Family

Audrey and Kristin looking up at the tree, fire crackling, Bing Crosby in the background. I love my family.
Audrey and Kristin looking up at the tree, fire crackling, Bing Crosby in the background. I love my family.



Super duper super moon.








Another visit to Mauna Kea, the biggest telescope cluster on earth. The telescopes above the clouds. For the car guys, there is even a Subaru Telescope! I don’t see an EVO telescopes up here. 😉
[Note: The Subaru Telescope is in no way related to Subaru the car company. Subaru is a Japanese word for the Pleiades, an open star cluster in Taurus. The Subaru telescope is the national telescope of Japan]
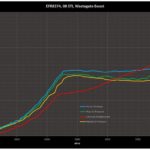


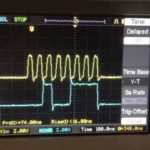
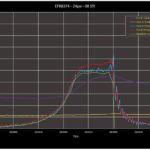
Next round of interesting data, captured with my prototype ADCCAN. (EFR8374, 2008 STI)
Three boost settings (Wastegate, 22.5PSI, and 24.5PSI) with exhaust backpressure measurements. All three of these are still relatively low boost pressures, so the exhaust backpressure to manifold pressure ratio is not particularly high. It is typical to have exhaust pressure to intake pressure ratios of 2:1 to 3:1. Much above 3:1 and there must be some significant restrictions or the size of the engine is poorly matched to the turbine flow.
In the wastegate run, peak EGBP:IP was about 1.28:1. At 22.5PSI it was 1.32:1, and at 24.5PSI it was about 1.34:1. All of those are pretty low ratios, indicating adequate turbine flow. The really interesting data will come at higher pressures. The last graph show spool in each gear, starting at around the same point (~2000rpm). I have not done any optimization for gear comp, which would help a lot in 2nd gear. 1st gear is difficult to improve dramatically, but the solution there is launch control. With LC running I can be at 10-12psi before launching. I still need to get the compressor/turbine wheel speed sensor logging, which will be valuable to see at higher manifold pressures.
Development continues. With the analog capture and CAN interfaces done and working, I moved on to getting the SDCard interface configured. While it is great to log over CAN, I also want to be able to log to SD from the ADCs and from the CAN bus. When I made the board I put a set of SPI pins on a header so I could connect a MicroSD socket. (note I didn’t remember to put a pullup on DO which is normally open collector, but it appears the SD card itself has a weak pullup internally).
Interfacing to the SDCard over SPI has been an interesting endeavor. The SD-SPI spec is an odd one, with lots of goofy timing constraints. When you initialize the the card you have to start it up with 100-500khz SPI, then once it is initialized you can switch to a higher clock rate. And of course with SPI you send and receive at the same time, so if you are waiting for something, you are sitting in an transmit loop waiting for something that looks like data to appear.
The PIC I am using (dsPIC33) only supports SPI speeds up to 15MHz SCLK (according to the datasheet), although I was able to get it working at 20Mhz SCLK. With single wire SPI, using single block writes (which have a lot of overhead) I am getting about 640KB/sec, or a bit over 5Mbit/sec. That is more than sufficient for my use case, as even with 24 channels at 1000 hz we are talking about writing 240KB/sec maximum write speed.
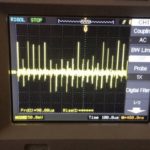
For running this on my desk I was using an inexpensive 12V wall wort, and when I looked at the output I was surprised. (see last picture).. 250mv noise that is just terrible. I have similar noise on the +5 and +3.3V rails, which means I don’t have enough filtering on the power regulation side. The 12V source in a car can be much worse, so I need to look at adding some LC filtering. I’ll finish up my SD interface, then get working on overlaying a FAT16/FAT32 filesystem implementation.
Thanks to Matthew R. Wilson for the help debugging the clock signals!


Here is a quick video about the dev environment I’m using for the
CanADC module.
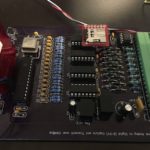
A pic of the board with the FLIR camera as well.
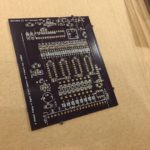



My second prototype PCBs arrived today. I populated the analog sections and tested the amps and filters. Everything looked great. I finished up the digital sections, flashed on my new firmware, and got blinking lights. And CAN output at 100hz from all of the analog channels. 🙂




I’m facing an interesting dilemma. I have a 20 conductor cable (that I built) going into the cabin on my STI, intended to connect to the DAQ system. It goes to the engine bay and terminates in a 20 pin Deutsch HDP connector. From that I need to run to 18 different sensors, where each sensor has a sensor output, plus power and ground.
Option 1: I could do it like an OEM factory harness would work.. I would have one or two power and ground wires going around the engine as well as the signal wires, and at locations close to the sensors the signal wire would connect, and the power and ground would have a tap. This would be your typical black tape wrapped around plastic split loom tubing. The plus side is the ease of building, but once it is done and all wrapped up, it takes some work to add more sensors, or change the location of a sensor. It also means a bunch of splices in the 5v and ground wire. Another minor issue is that I need to add some 5V pullups for some of the sensor, so that would have to but put in the harness as well.
Option 2: I could make a custom PCB like I did for my GTR. (See picture 2 and 3). In that case the PCB had the pullups, plus the +5 and Ground aggregation. I used PCB mount screw terminals, then I then connected to HDP connectors. This solved the multiple things needing connection to a single 5V and GND wire. I could even skip the HDP connectors on the sensor side, and have each sensor wire connect right into the terminal blocks. In this way every sensor connects back to one place.
Option 3: I could make a new PCB and case, but using something like the EN3(or M8, or Micro-Con-X) connector in picture 4. That is similar to how the AIM Dash sensors are connected. For 18 sensors I would need 18 of these, which would be a difficult fit in a single panel. I’d probably need 2 or 3 panels with these connectors on them, all aggregating down to the 20 pins HDP connector. The advantage of this setup is each sensor cable is just a plug-and-play fitting that can be moved, replaced, etc.
Any thoughts?

I really like Prowireusa.com. Lots of choices of colors for their M22759/32 Tefzel wire. I’m a strong believer in having all wires in a single harnesses with unique colors… Or at least unique per connector. I remember looking at one of the ECU harnesses on my GTO (LS2), and sure enough one ECU connector had 3 different unrelated circuits with the same color wire!
So.. 21 wires per harness is my limit right now. Need to get some more colors.



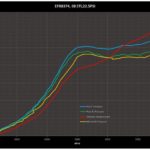
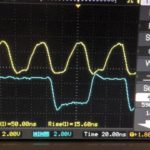
And a bit more data.. Here are three graphs at different boost levels. Wastegate, 22.5psi, and 24psi. Red and Blue show pre and post intercooler pressure levels, purple and yellow show pre and post intercooler temperatures, and green manifold pressure.
A few interesting observations: The Intercooler is working very very well. You can see the rise in temperature going into the intercooler going as high as 240F, but air temp coming out is just 10 degrees above ambient. This efficiency would certainly change with more time at high boost. Overall output temperatures at this boost level is very good. I was seeing about 50 degrees F hotter with the 7670 at the same boost level.
Pressure post intercooler, but pre throttle body is the most variant. I suspect that is related to the convoluted path, as well as the throttle body disruption. It is interesting to see that to get manifold pressure of 24psi, the turbo is pushing out at almost 28psi.
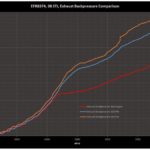
The fourth graph is a zoom in of the pressures post bypass valve opening event. In this setup the bypass valve is on the turbo itself, which is pretty far away from the closing throttle plate. You can see the oscillations as the pressure wave moves from the throttle plate, through the intercooler, and to turbo outlet. That looks to be about 9Hz, and I would assume that frequency is correlated to the length of pipe between the two end points. The post intercooler signal is stronger, which makes sense giving the damping from the intercooler.